Interfaces Vestibles, Robótica y Aprendizaje Creativo
Durante el segundo semestre de 2022, realizamos un taller para explorar el aprendizaje creativo con ninãs y niños de jardín de infancia utilizando el artefacto GloveBot que está compuesto por cuatro guantes y un robot en forma de carrito que utilizan la tecnología Arduino.
Con la participación de los docentes, planificamos las actividades desarrolladas con los niños. En el primer taller, presentamos el artefacto a los niños. Como actividad inicial, cada niño eligió un guante y experimentó el artefacto GloveBot. Después, la clase se organizó en equipos de cuatro y cada miembro del equipo utilizó un guante. Cada equipo tuvo que mover el carrito-robot hacia un garaje de juguete usando gestos de las manos a través de los guantes. Para el segundo taller, los niños también se organizaron en equipos de cuatro. Cada grupo creó una historia y dibujó los personajes. El carrito-robot fue disfrazado con los dibujos de los niños para representar los diferentes personajes. Los equipos movieron el carrito-robot usando los guantes del artefacto GloveBot de acuerdo al desarrollo de sus historias en un escenario que tenía objetos y un proyector que mostraba diferentes imágenes relacionadas a la historia.
GloveBot permitió la participación de cada niño (atención, cuerpo y acción) así como la identificación de las acciones de otras personas. Además, nuestro artefacto permitió a los niños interactuar de manera coordinada y reflexionar sobre el resultado de sus acciones. En cuanto a la creatividad, nuestro artefacto posibilitó la participación activa de los niños durante la narración de sus propias historias y la práctica de habilidades como la colaboración y la percepción espacial.
Los talleres de Interfaces Vestibles, Robótica y Aprendizaje Creativo fueron propuestos y conducidos por la investigadora Marleny Luque Carbajal como parte de su doctorado, en el contexto del proyecto Sistemas Socioenactivos.

Investigadora presentando el artefacto "GloveBot"
La investigadora está enseñando a los niños como utilizar el artefacto "GloveBot".

Niño con el guante blanco en la mano derecha
La investigadora está poniendo el guante blanco en la mano derecha de un niño. Nota: El guante blanco representa el movimiento "Girar a la derecha".

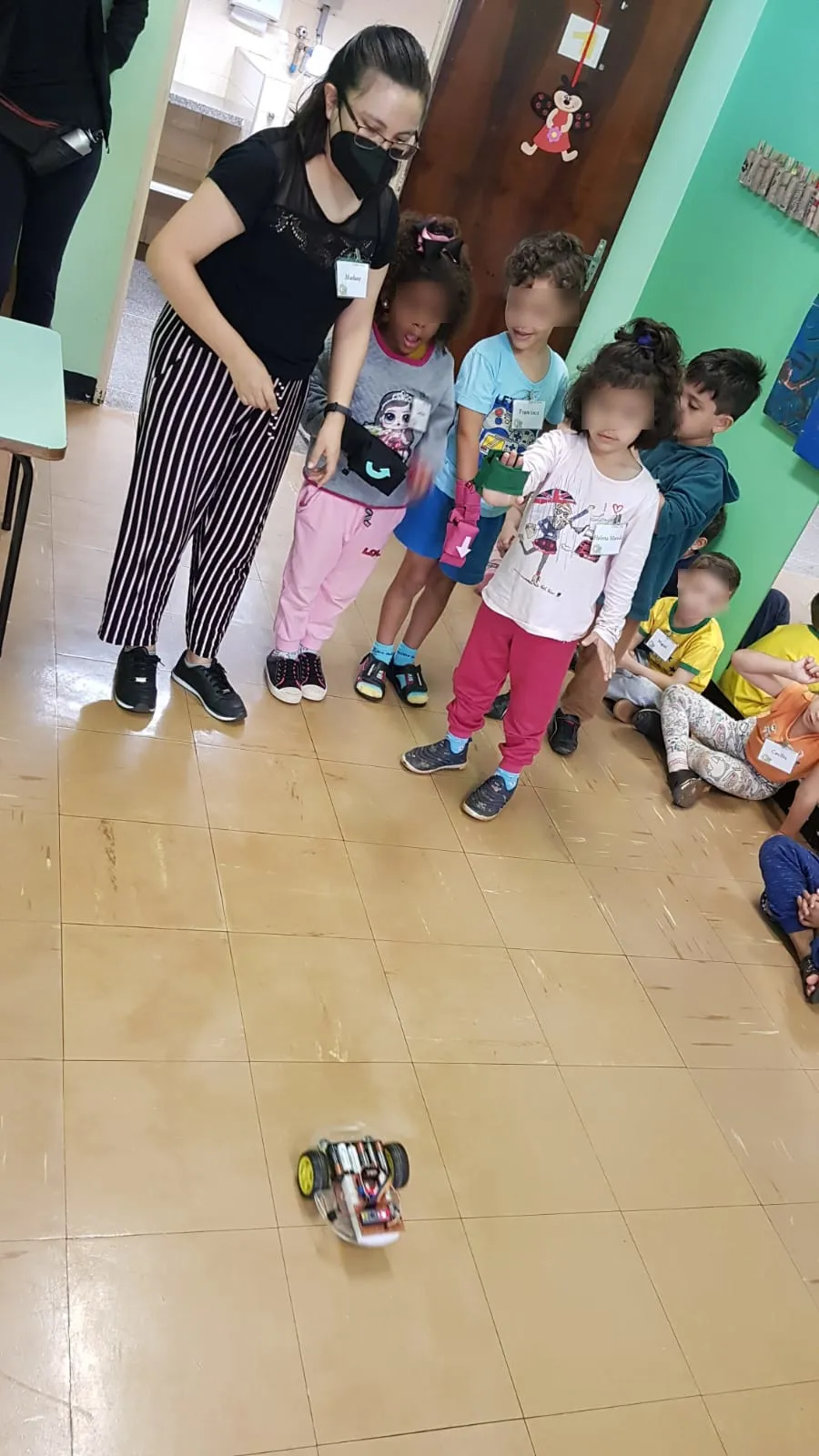
Grupo de alunos experimentando el artefacto "GloveBot"
Un grupo de niños (tres niños y una niña) está utilizando los guantes para mover el carrito robot. La pesquisadora está ayudando a un niño.
Alunos experimentando el artefacto "GloveBot"
Equipo de niños usando guantes para mover el carrito robot. Los niños que están sentados en el suelo observan atentamente los movimientos del robot.

Niños experimentando su historia con el artefacto "GloveBot"
Un equipo de tres niñas y un niño están experimentando su historia en un escenario que cuenta con un proyector que proyecta imágenes relacionadas con la historia y el carrito-robot es uno de los personajes.
Aquarela Virtual en la escuela
En el sistema Aquarela Virtual, los niños utilizan juguetes caseros, enriquecidos con códigos QR para interactuar entre ellos en escenarios animados basados en imágenes de la canción Aquarela (Vinícius de Moraes, Toquinho, Guido Morra y Maurizio Fabrizio, 1983). Los participantes eligen avatares para representarlos en los escenarios, pudiendo reportar sus emociones a amigos y al sistema con la ayuda de emoticones. La secuencia de animación de la escena musical digital se elige entre todos los niños que seleccionan un juguete relacionado con cada parte de la música, un pájaro, un barco, un castillo, un sol o un avión, entre otros, y se lo muestran a la cámara del computador. Al final de la actividad, el sistema muestra en el “gran final”, una compilación de fotos tomadas por los participantes durante la sesión, al son del tema musical y elementos de animación. En paralelo con el sistema se utilizó una herramienta de videoconferencia en la que los niños pudieron hablar entre ellos y con los investigadores que apoyaron de forma remota el experimento, mientras dos investigadores estaban presentes físicamente en el lugar.
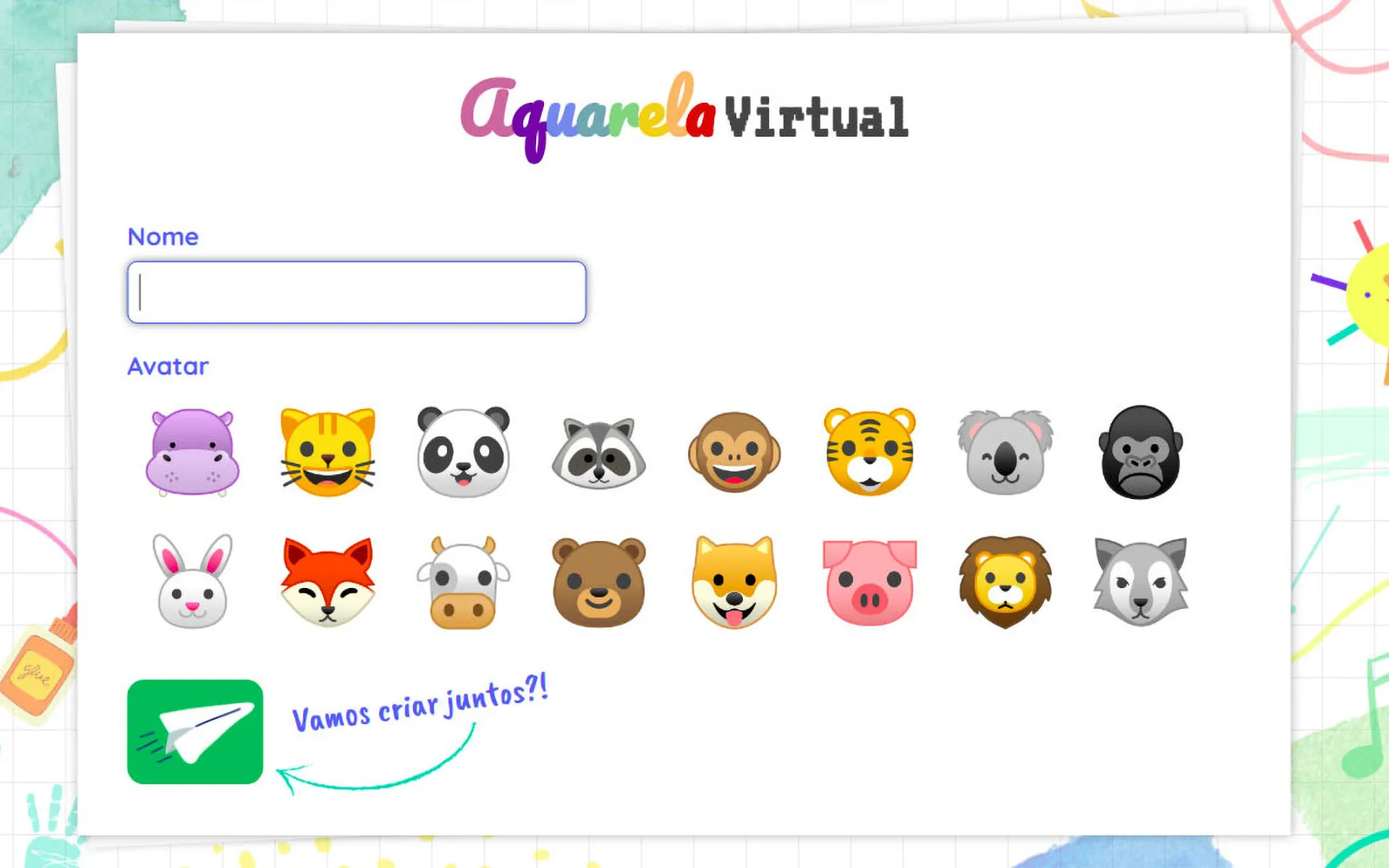
Pantalla de login del sistema "Aquarela Virtual"
Pantalla de login del sistema "Aquarela Virtual", donde es posible elegir un avatar y colocar un nombre para interactuar con otros participantes dentro del sistema.

Niño mostrando para la webcam el emoji feliz (amarillo) con código QR
Niño interactuando con el emoji feliz (amarillo) con código QR y observando las respuestas del sistema "Aquarela Virtual" en la pantalla de la computadora.

Niña seleccionando un emoji para interactuar con el sistema "Aquarela Virtual"
Niña seleccionando un emoji para interactuar con el sistema "Aquarela Virtual".

Niño mostrando su objeto con código QR para la webcam
Niño mostrando su objeto con código QR para la webcam y observando las respuestas del sistema "Aquarela Virtual" en la pantalla de la computadora.

Niño mostrando para la webcam el emoji Tranquilo (verde) con código QR
Niño interactuando con el emoji Tranquilo (verde) con código QR y mirando las respuestas del sistema "Aquarela Virtual" en la pantalla de la computadora.
Lobo Robô y la Caixa Telepática
Con la colaboración de los docentes en actividades anteriores, se realizó una adaptación del cuento de La Caperucita Roja asociando fragmentos del cuento con emojis compatibles con el sentimiento relatado en dicho fragmento. Por ejemplo, la frase “Caperucita estaba feliz de ver que había llegado a la casa de la abuela” se asoció con el emoji “Alegría”.
El taller siguió la siguiente dinámica: dentro de una caja de cartón, denominada Caixa Telepática (Caja Telepática), un niño elige una expresión afectiva secreta (emoji), que será la entrada para un algoritmo de comportamiento del robot mBot, disfrazado de Lobo Feroz. Después de observar el comportamiento del robot, los otros niños votan con tarjetas RFID qué expresión secreta creen que fue elegida y representada por el robot. La votación, a su vez, alimenta el algoritmo de comportamiento asociado al robot, en un ajuste continuo con cada nueva ronda.

Expresión emocional a ser imitada
Niño observando la expresión emocional (emoji) que debe imitar frente a la computadora en la "Caixa Telepática".
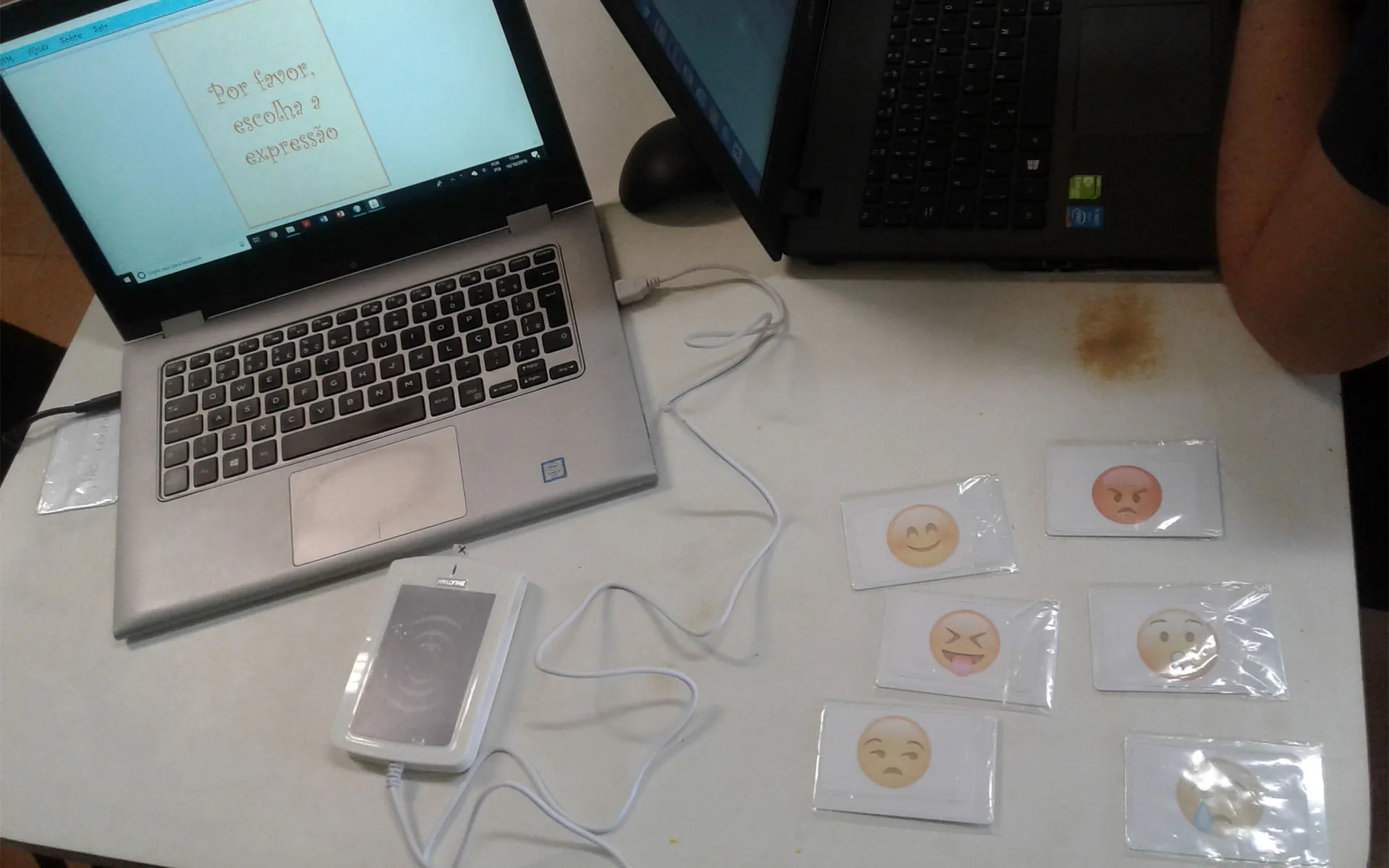
Emojis equipados con etiquetas RFID
Seis emojis equipados con etiquetas RFID para la expresión de emociones junto con el lector de etiquetas RFID.

Niño eligiendo una expresión emoji
Niño eligiendo una expresión emoji de un grupo de 6 expresiones disponibles que él cree que fue imitada dentro de la "Caixa Telepática".

Niña imitando una expresión emocional dentro de la "Caixa Telepática"
Niña imitando una expresión emocional dentro de la "Caixa Telepática" de acuerdo con un emoji mostrado para ella.

Niños observando las acciones del robot
Un grupo de niños observando al robot realizando acciones en base al reconocimiento de la expresión imitada por una niña dentro de la "Caixa Telepática".
Lobo Robô
El objetivo del taller fue permitir que los niños se organicen para cumplir con la tarea de guiar al robot mBot, disfrazado de lobo, a un punto específico del escenario físico, en el contexto de una narrativa creada por ellos basado en el cuento de La Caperucita Roja. Para ello, se creó un ambiente en el que el proceso de interacción entre los participantes interfiere en la forma de actuar (y reaccionar) de cada participante, es decir, el sistema se retroalimenta constantemente, adoptando un comportamiento no determinista.
Con este taller se logró crear y evaluar una primera versión de un Sistema Socioenactivo dentro de un ámbito educativo, a partir del análisis y reconocimiento de patrones en el proceso de interacción de los niños con la tecnología y entre ellos. Entre los comportamientos observados se puede destacar la colaboración y coordinación de acciones para lograr un objetivo común.

Niños bloqueando el camino del "Lobo Robô"
Niños bloqueando el camino del "Lobo Robô", un robot mBot vestido como un lobo feroz, para ayudarlo a llegar a su meta colocando sus botas delante de él.

El "Lobo Robô" llegando a su meta
Niños observando como el "Lobo Robô", un robot mBot vestido como un lobo feroz, está cerca de llegar a su meta (círculo negro).

El "Lobo Robô" llega a su meta
Niños observando al "Lobo Robô" cuando llega a su meta.

Niña interactuando con el "Lobo Robô"
Una niña bloqueando el camino del "Lobo Robô", un robot mBot vestido como un lobo feroz, para ayudarlo a llegar a su meta colocando su bota delante de él.

Niños ayudando al "Lobo Robô" a alcanzar su meta
Niños interactuando con el "Lobo Robô", un robot mBot disfrazado de lobo feroz, para ayudarlo a alcanzar su meta.
Programación Tangible
Realizamos talleres piloto con docentes de preescolar para que pudieran tener su propia experiencia con el ambiente de programación tangible TaPrEC+mBot. De esta forma, los docentes colaboraron en la planificación de las actividades que se desarrollaron en los talleres con los niños. Los maestros sugirieron usar solo los siguientes bloques de programación: ADELANTE, ATRÁS, GIRO A LA IZQUIERDA, GIRO A LA DERECHA.
Comenzamos el taller con los niños, presentándoles el ambiente TaPrEC+mBot y explicándoles cómo crear un programa tangible. Después de una breve demostración de cómo funciona cada bloque de programación, les explicamos la tarea que debían realizar y luego los niños comenzaron a crear programas tangibles. Las tareas eran diferentes para cada taller: en el primer taller, los niños tenían que programar el robot para entrar en un garaje (una casita construida con cartón); en el segundo taller, los niños debían programar el robot para cruzar un puente (de cartón); y en el tercer taller, los niños debían crear su propio escenario de programación.
Los talleres de programación tangible fueron propuestos y conducidos por la investigadora Marleny Luque Carbajal como parte de su doctorado, en el contexto del proyecto Sistemas Socioenactivos.

Cuatro niños creando un programa informático tangible
Una niña selecciona los bloques de programación, un niño ingresa el programa en el entorno "TaPrEC+mBot" a través del lector RFID. Los otros niños están observando a sus compañeros de clase.

Niños observando el robot mBot
Cuatro niños observan el movimiento del robot mBot. mBot está ejecutando el programa tangible que crearon los niños.

Niños creando un programa tangible
Tres niños están alrededor del programa tangible. Un niño sostiene el lector RFID y los otros niños observan el programa tangible.

Toda la clase observando a dos niños creando un programa tangible
Dos niños están creando un programa tangible para que el robot mBot entre en un garaje de cartón. La clase está observando y animando a sus amigos.

Niño pasando el lector RFID sobre un programa tangible
Un niño pasa el lector RFID sobre su programa tangible. Cerca de él, una niña está organizando otro programa tangible.
Narración de Historias
A lo largo de la segunda mitad de 2018, realizamos talleres de narración de historias explorando la tecnología Near Field Communication (NFC). NFC es una tecnología inalámbrica para el intercambio de datos en distancias cortas y dirigida a dispositivos móviles.
Para el primer taller, con la colaboración de niños y docentes, creamos el Livro Mágico, un kit de narración que apoya la creación de historias significativas. La clase creó un cuento, luego los fragmentos del cuento fueron narrados por los niños y grabados en formato mp4. Cada registro de voz se asoció con una etiqueta NFC. En el segundo taller llevamos a cabo el TechMemory Game (Juego de la memoria), un juego lúdico con 12 tarjetas equipadas con etiquetas NFC. Cada etiqueta NFC tenía grabada una palabra clave de la historia inspirada en La Caperucita Roja que crearon los niños. En el tercer taller creamos un escenario de programación con objetos con etiquetas NFC. Las etiquetas NFC tenían grabaciones de fragmentos de una historia creada por la clase donde el robot disfrazado de lobo, Lobo Robot, era el protagonista. Los niños tuvieron que programar el Lobo Robot utilizando el ambiente TaPrEC+mBot para llegar a los objetos y descubrir los fragmentos de la historia.
Los talleres de narración de historias fueron propuestos y conducidos por la investigadora Marleny Luque Carbajal como parte de su doctorado, en el contexto del proyecto Sistemas Socioenactivos.

Toda la clase probando el artefacto "Libro Mágico".
Los niños están sentados en el suelo en círculo. Cada niño tiene una página del "Livro Mágico". Un niño tiene el teléfono inteligente en la mano y está listo para leer la etiqueta NFC.
Niños jugando al "Juego TechMemory"
Una niña ayuda a un niño a leer correctamente una tarjeta con NFC.

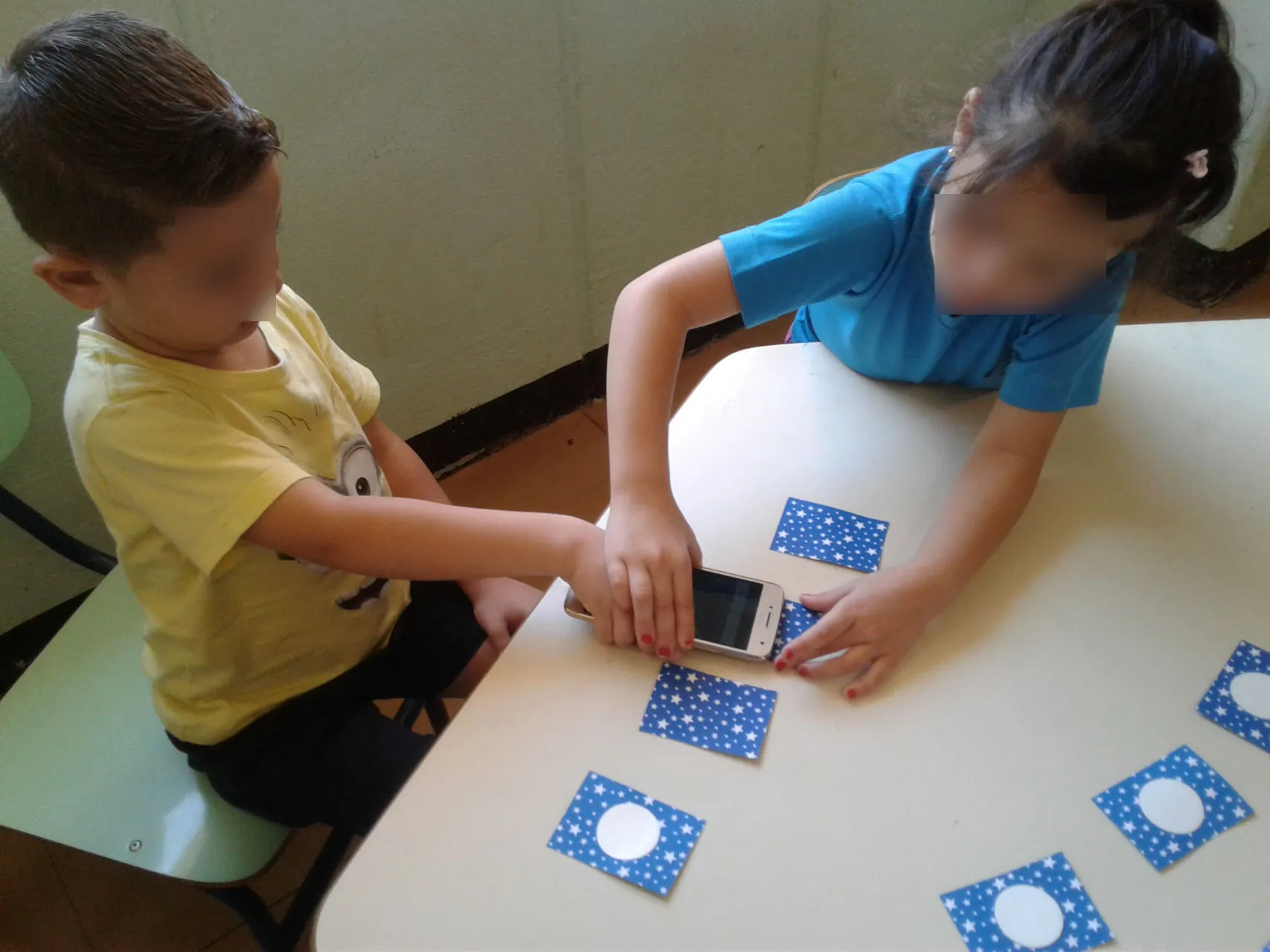
Cuatro niños jugando al "Juego TechMemory"
Un niño está leyendo la etiqueta NFC usando el teléfono inteligente, otro niño está contando las cartas que ha ganado y las niñas están esperando su turno para jugar.

Tres niños programando el mBot en un escenario con objetos equipados con etiquetas NFC
Un niño está creando un programa tangible, la niña está sosteniendo un objeto con forma de puerta y el otro niño está observando el movimiento del robot mbot.

Niños programando el mBot en un escenario con objetos equipados con etiquetas NFC
Un niño ingresa al programa en el entorno "TaPrEC+mBot" a través del lector RFID. Los otros niños están observando a su compañero de clase.